针对非结构化场景下的目标物体,开发机器人主动探索行为模式下的触觉具身智能。
例如,我们设计了一个简单稀疏的压阻阵列(2.7 Taxel/cm2),通过模仿人类摸麻将的动作(一次滑动),实现从亚微米到毫米级,快速自适应地物体轮廓与表面图案重建。
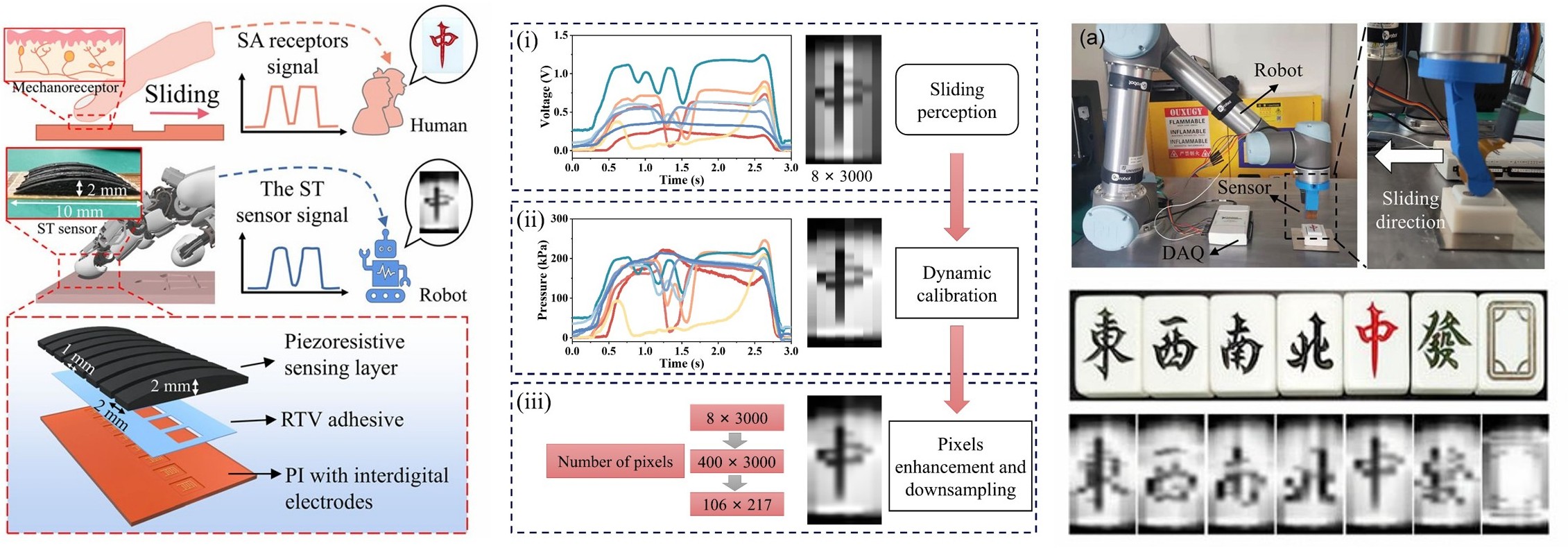

机器人自动识别麻将
基于触觉感知信息的物体属性(形变、重量、纹理等)可解释性表达。
例如,我们尝试去理解人皮肤触觉感受器对物体形变属性(软硬度与顺应性)的感知机理与逻辑,设计了自解耦的双模态(SA-Ⅰ+SA-Ⅱ)柔性形变属性传感器,通过机器人“捏一捏”的动作,实现了不受物体厚度影响的、自适应、定量的形变属性(软硬度和顺应性)的可解释性完整表达。我们演示了传感器对不同熟度溏心蛋、不同泡沫的自适应定量感知能力。
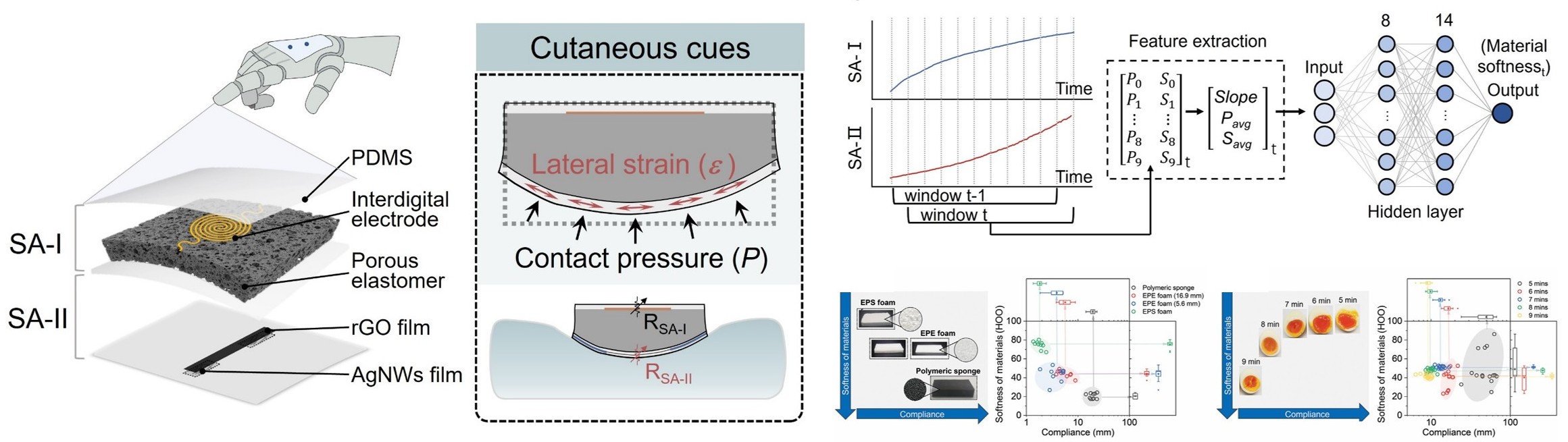

自适应定量感知鸡蛋的熟度

自适应抓取各类柔软物体与重物
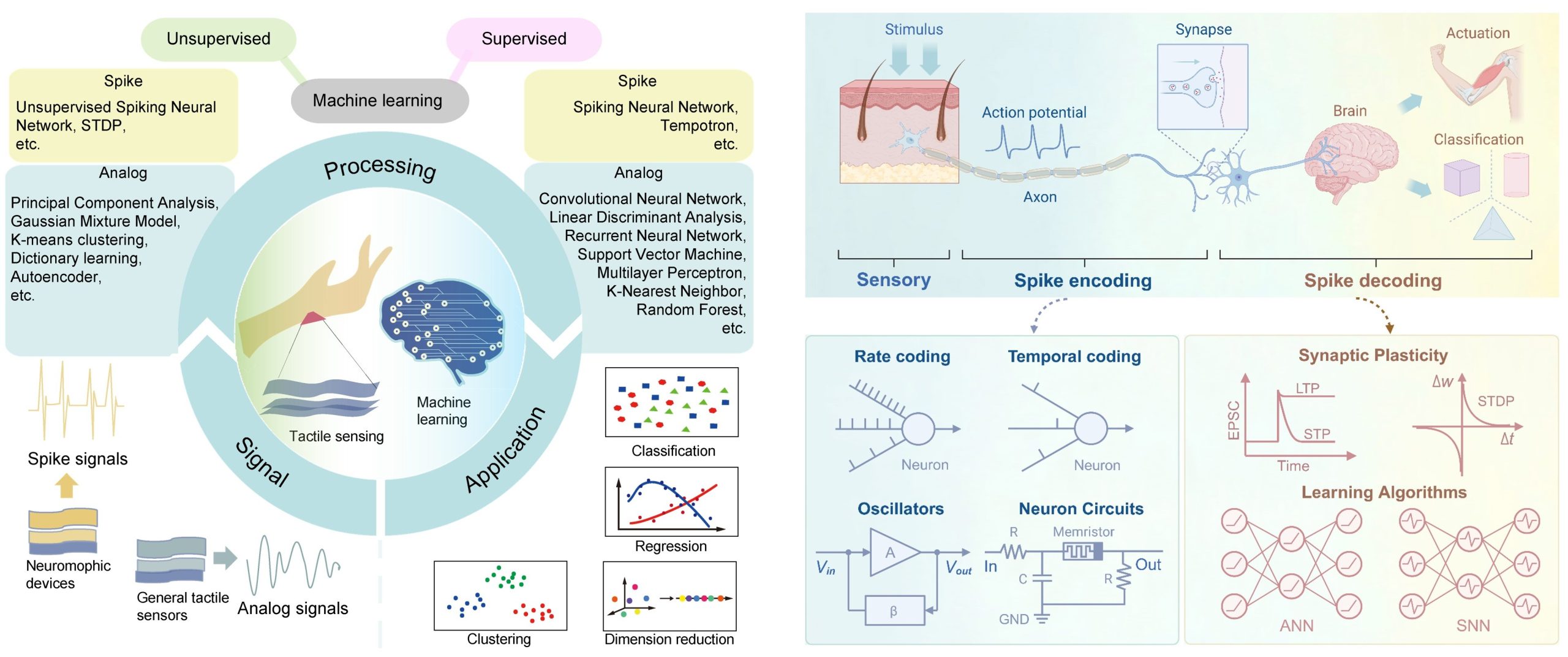
此外,我们还撰写两篇综述,专门总结了当前触觉信息的处理方法。