基于现实世界的交互实验不仅复杂而且耗时,传感器状态、实验条件等因素的改变容易影响模型的准确性。我们通过开发触觉模拟器,帮助我们完成传感器的原型设计、特征描述、映射关系的训练等方面内容。不同于视触觉模拟器,Taxel触觉模拟器的开发会更具挑战。
基于我们的触觉感知阵列,开发了触觉模拟器,实现了仿真应力场与真实传感器力信号的对齐及双向预测生成。

模拟器实现超分辨触觉感知
在触觉信息的加持下,通过控制算法,我们希望机器人灵巧手能够具备丰富的抓取策略、能够使用工具、能够完成复杂的非结构化场景下的任务。
例如,我们通过不同的手势指导机器人完成对不同物品的抓取策略。

手势与指向引导的机器人对不同物体的抓取策略
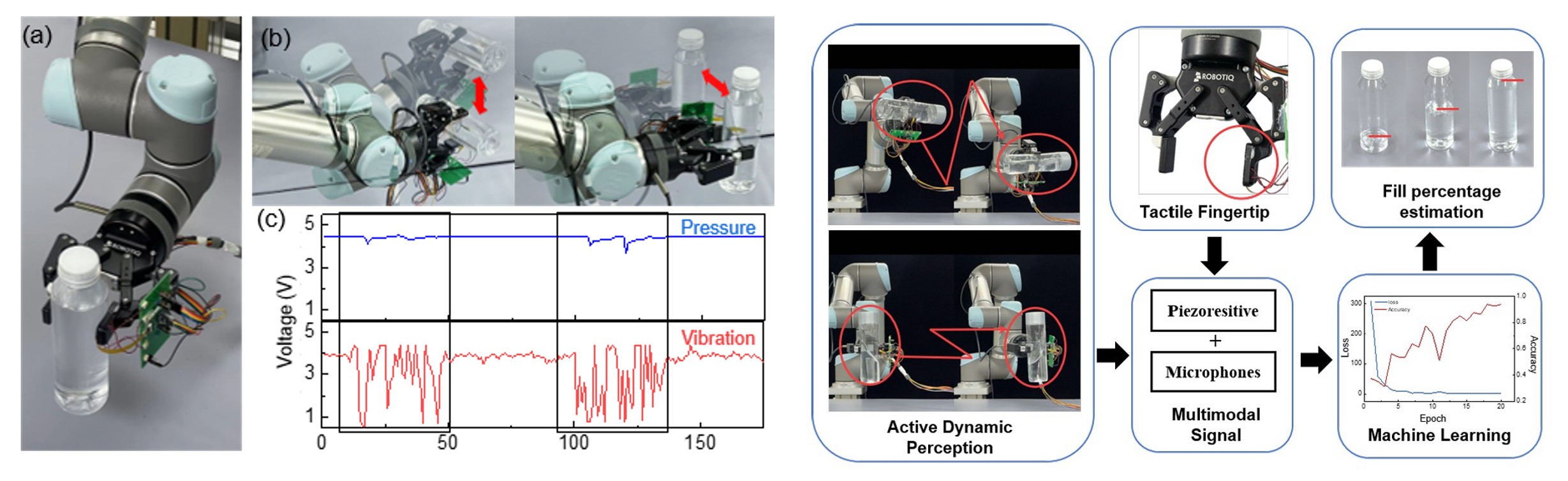
机器人通过摇晃实现瓶中液体状态感知。
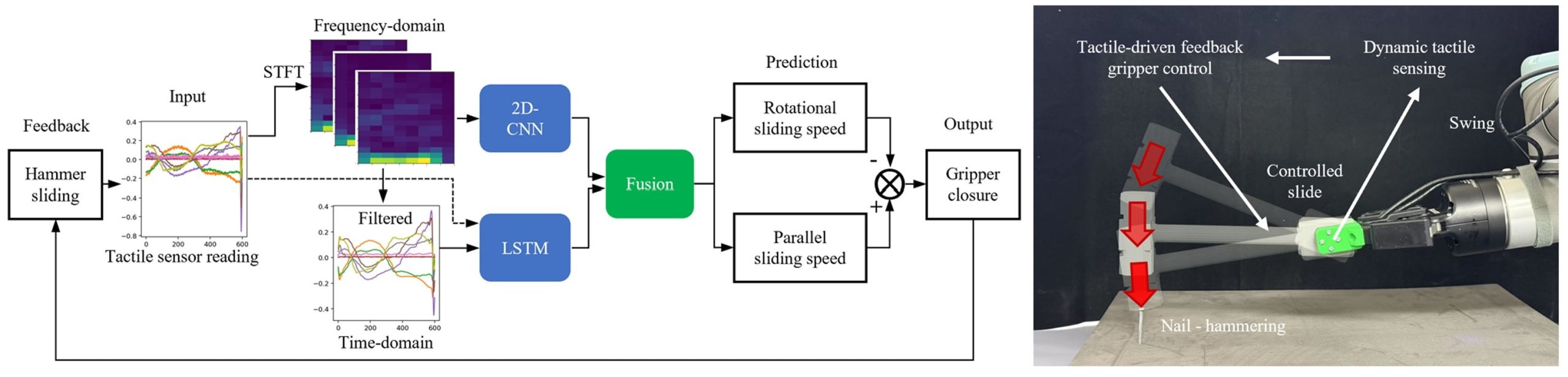
机器人执行锤击钉入任务。
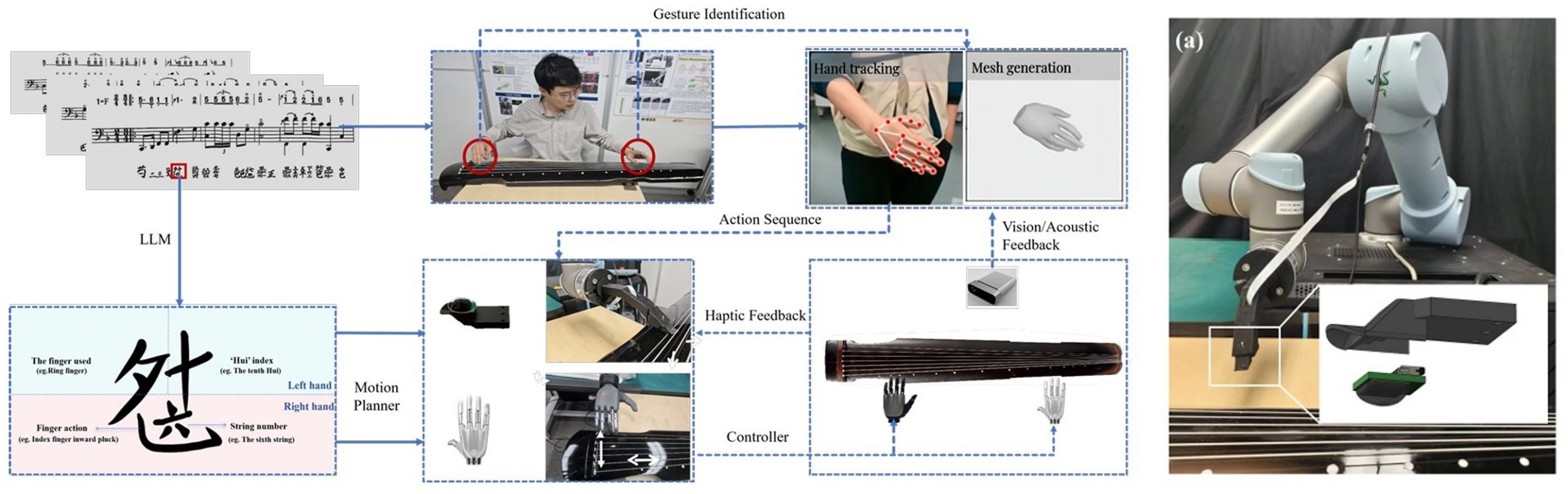
机器人灵巧手弹奏古琴。
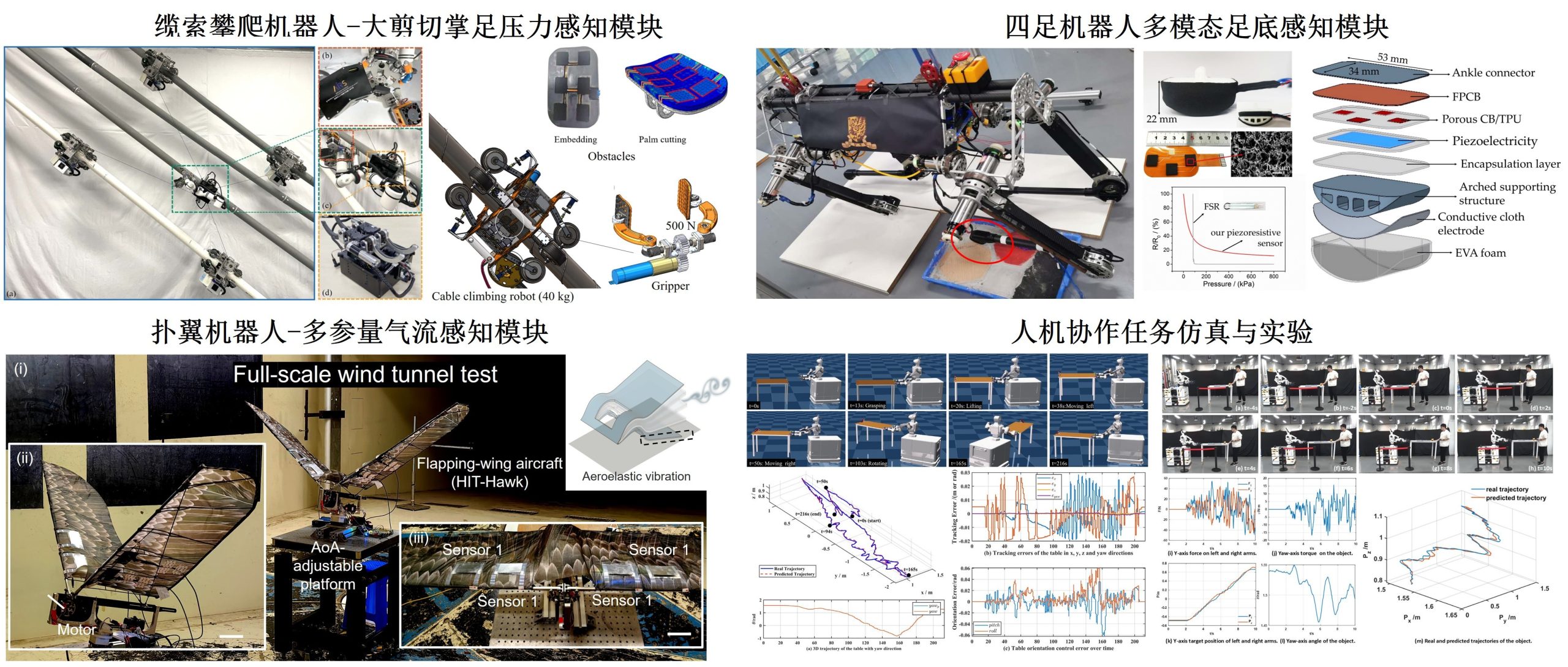
除了抓取操作,我们还与合作伙伴一起将我们的触觉技术应用在不同种类的机器人上,例如:缆索攀爬机器人、四足机器人、扑翼机器人、双臂协作机器人,也期待您的合作。